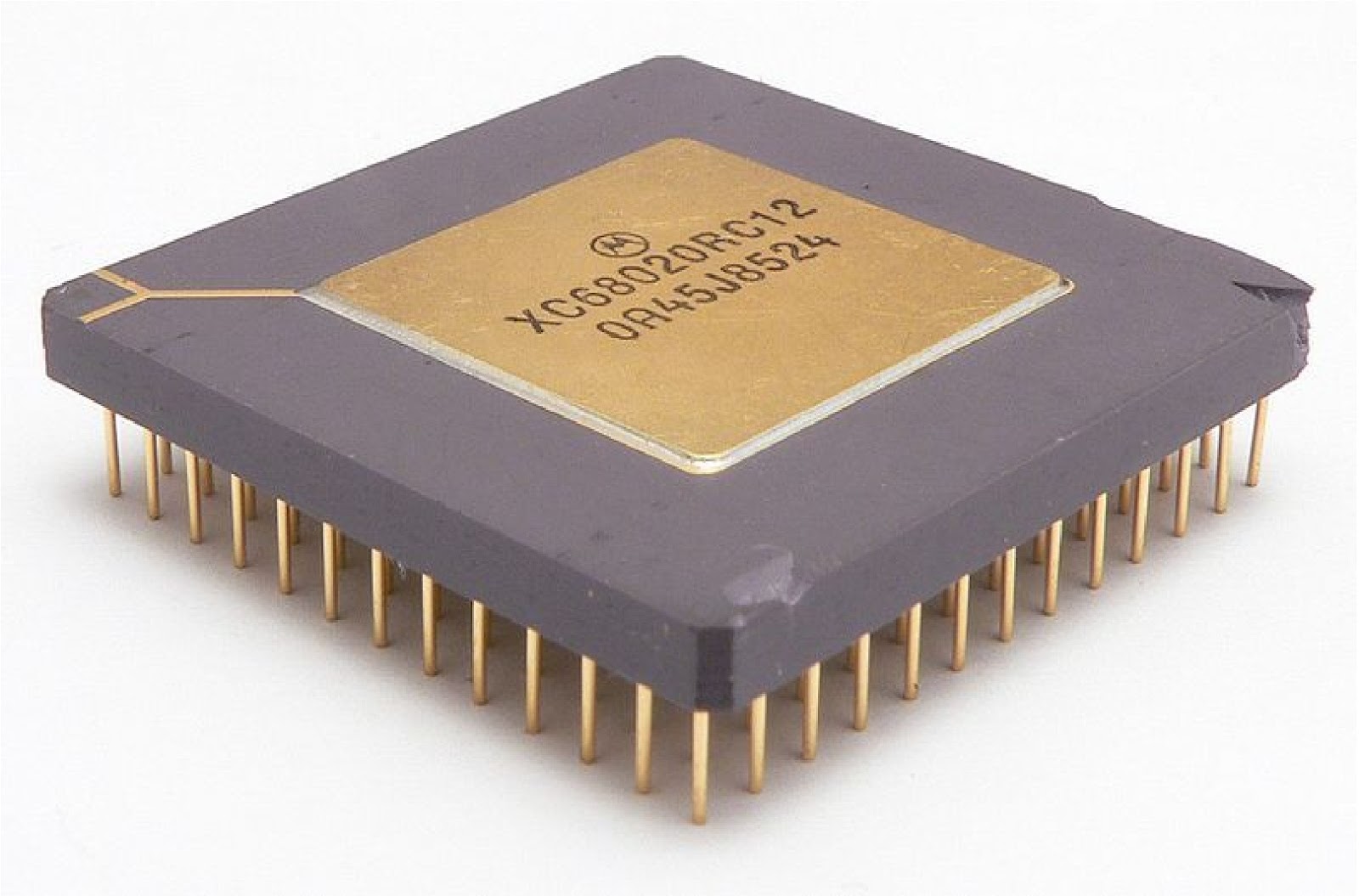
MICROPROCESADOR
DEFINICION
Es el circuito integrado central y más complejo de un sistema informático; a modo de
ilustración, se le suele asociar por analogía como el «cerebro» de un computador. Es un circuito integrado constituido por millones de
componentes electrónicos. Constituye la unidad
central de procesamiento (CPU)
de un PC catalogado como microcomputador.
Es el encargado de ejecutar los programas;
desde el sistema operativo hasta las aplicaciones de usuario; sólo ejecuta instrucciones programadas en lenguaje de bajo nivel, realizando
operaciones aritméticas y lógicas simples, tales como sumar, restar, multiplicar, dividir, las lógicas binarias y accesos a memoria.
Esta unidad central de procesamiento está constituida,
esencialmente, por registros, una unidad de control, una unidad aritmético lógica (ALU) y una unidad de cálculo en coma flotante(conocida
antiguamente como «co-procesador matemático»).
El microprocesador está conectado, generalmente, mediante un zócalo específico a la placa base de la computadora.

ARQUITECTURA
El microprocesador tiene una arquitectura parecida a la computadora digital. En otras palabras, el microprocesador es como la computadora digital porque ambos realizan cálculos bajo un programa de control. Consiguientemente, la historia de la computadora digital ayuda a entender el microprocesador. El hizo posible la fabricación de potentes calculadoras y de muchos otros productos. El microprocesador utiliza el mismo tipo de lógica que es usado en la unidad procesadora central (CPU) de una computadora digital. El microprocesador es algunas veces llamado unidad microprocesadora (MPU). En otras palabras, el microprocesador es una unidad procesadora de datos. En un microprocesador se puede diferenciar diversas partes:
- Encapsulado: es lo que rodea a la oblea de silicio en si, para darle consistencia, impedir su deterioro (por ejemplo, por oxidación por el aire) y permitir el enlace con los conectores externos que lo acoplaran a su zócalo a su placa base.
- Memoria cache: es una memoria ultrarrápida que emplea el micro para tener a alcance directo ciertos datos que «predeciblemente» serán utilizados en las siguientes operaciones, sin tener que acudir a la memoria RAM, reduciendo así el tiempo de espera para adquisición de datos. Todos los micros compatibles con PC poseen la llamada cache interna de primer nivel o L1; es decir, la que está dentro del micro, encapsulada junto a él. Los micros más modernos (Pentium III Coppermine, Athlon Thunderbird, etc.) incluyen también en su interior otro nivel de caché, más grande, aunque algo menos rápida, es la caché de segundo nivel o L2 e incluso los hay con memoria caché de nivel 3, o L3.
- Coprocesador matemático: unidad de coma flotante. Es la parte del micro especializada en esa clase de cálculos matemáticos, antiguamente estaba en el exterior del procesador en otro chip. Esta parte esta considerada como una parte «lógica» junto con los registros, la unidad de control, memoria y bus de datos.
- Registros: son básicamente un tipo de memoria pequeña con fines especiales que el micro tiene disponible para algunos usos particulares. Hay varios grupos de registros en cada procesador. Un grupo de registros esta diseñado para control del programador y hay otros que no son diseñados para ser controlados por el procesador pero que la CPU los utiliza en algunas operaciones, en total son treinta y dos registros.
- Memoria: es el lugar donde el procesador encuentra las instrucciones de los programas y sus datos. Tanto los datos como las instrucciones están almacenados en memoria, y el procesador las accede desde allí. La memoria es una parte interna de la computadora y su función esencial es proporcionar un espacio de almacenamiento para el trabajo en curso.
- Puertos: es la manera en que el procesador se comunica con el mundo externo. Un puerto es análogo a una línea de teléfono. Cualquier parte de la circuitería de la computadora con la cual el procesador necesita comunicarse, tiene asignado un «número de puerto» que el procesador utiliza como si fuera un número de teléfono para llamar circuitos o a partes especiales.

MARCAS
En cuanto a los fabricantes, actualmente se encuentra procesadores de:
* INTEL: es la marca estándar.
* AMD
* CYRIX: fabrica procesadores para Texas, IBM y Thompson
* TEXAS INSTRUMENTS: son procesadores Cyrix con la marca Texas Instruments.
* IBM: son procesadores Cyrix con la marca IBM.
* THOMPSON: son procesadores Cyrix con la marca Thompson.
* NEXGEN: necesitan placas especiales al no ser compatibles a nivel de patilla
EVOLUCIÓN DE LOS MICROPROCESADORES
En 1975 Intel decidió ponerse manos a la obra para construir su primer micro de 16 bits que salió al mercado en 1978. Se trataba del 8086, que definió el inicio de su gama deproductos más famosa, la familia de microprocesadores x86.
La longitud de los registros del 8086 era de 16 bits (de ahí su denominación de 16 bits), había versiones que funcionaban a 4.77 y 8 MHz, tenía un busde datos de 16 bits y un bus de direcciones de 20 bits, lo que le permitía acceder a un máximo de memoria de 1 Mb según el cálculo 2 elevado a 20.
Seguidamente, en 1979, Intel sacó el 8088, que en contra de lo que podamos pensar no es mejor que el 8086. La diferencia era sustancial; el bus de datos era de 8 bits (la mitad). Este paso hacia atrás estuvo provocado por el estado de la industria de la época. Utilizar un bus de datos de 16 bits suponía forzar al mercado a desarrollar para 16 bits lo que implicaba un incremento en los costes de desarrollo de controladores de periféricos ymemorias. El síntoma fue que Intel se había adelantado a su época.

Introducido en 1985, el 80386 DX supera un nuevo escalón en el avance tecnológico en microprocesadores. Se incorpora una nueva ampliación y surge el número mágico, el 32. Los buses de datos y de direcciones se amplían hasta 32 líneas de datos, ocurriendo lo mismo con el tamaño de los registros. Esta ampliación supone un incremento en la memoria RAM física instalada. Puede direccionar 4 Gb de memoria física (DX significa Doubleword eXternal) y 64 Tb de memoria virtual, una cifra que en la actualidad está aún muy por encima de las posibilidades económicas de los usuarios (a ver quién instala 4.000 Megabytes de RAM, unos 20 millones de pesetas).
Arranca en modo real, al igual que el 80286, e incorpora un nuevo modo de operación: el modo real virtual del 8086, que permite tener varias sesiones 8086 trabajando simultáneamente simulando una especie de pseudomultitarea.
Se incluye un coprocesador matemático interno que dobla las prestaciones de un 80387 trabajando a la misma velocidad. Se logra un diseño mejor y la comunicación entre el chip principal y el coprocesador matemático es interna, lo que mejora la velocidad en las transferencias y unas sincronizaciones más estrechas.
La memoria cache (8 Kb) del microprocesador está dividida en 4 caches de 2 Kb cada una. Esto agiliza la ejecución de algunas aplicaciones. Si se asigna una memoria cache secundaria (L2) el rendimiento del micro puede aumentar hasta un 30 por ciento más.
El 80486SX es igual que un 80486DX, sólo que el coprocesador matemático está inhabilitado. El coprocesador matemático 80487SX es en realidad un 80486DX puro que desactiva por completo el 80486SX, sin que podamos retirarlo de la placa. Las velocidades a las que funcionan son de 25, 33, 40 y 50 MHz. Hay versión SL para portátiles.

En la segunda generación de Overdrives se olvidó el pin 169, teniendo los 168 que los hacían compatibles con los zócalos de los 80486. En estos casos la actualización es sencillísima: quitar el que estaba y poner el nuevo en el mismo lugar.
La tercera generación de Overdrives trabaja con un consumo menor para reducir de este modo su alta temperatura. El voltaje se reduce a 3.3 voltios de los 5 que necesitaban los anteriores. Si vas a comprar un DX2 o DX4 fíjate bien qué voltaje utiliza vuestra placa. los Overdrives etiquetados como tal funcionan a 5V, los etiquetados directamente como DX4, sin disipador, funcionan a 3.3V.

La quinta generación de microprocesadores Intel tomó el nombre de Pentium. Aparecido en marzo de 1993 en frecuencias de trabajo de 60 y 66 MHz llega a ser cinco veces más potente que un 80486 a 33 MHz. Fabricados con un proceso BiCMOS de geometría de 8 micras y con una arquitectura superescalar, los microprocesadores Pentium se encuadran en un concepto RISC. Mientras que el 80386 y el 80486 tienen una unidad de ejecución, el Pentium tiene dos, pudiendo ejecutar dos instrucciones por ciclo de reloj con sus correspondientes cálculos, ya que también tiene dos unidades aritmético-lógicas (ALU). El 80386 (CISC) ejecuta un instrucción en varios ciclos de reloj y el 80486 ejecuta una instrucción por ciclo de reloj (en términos medios).

SISTEMA DE REFRIGERACIÓN
La temperatura puede hacer que un dispositivo sea inestable, es decir, que cometa errores en el procesamiento de datos. Por ejemplo, en tiempos de los 386 y 486, con un disipador pequeño ya era suficiente puesto que la temperatura no era excesiva. Pero hoy en dia, debido a los millones de transistores que hay en el interior de un micro y la velocidad a la que trabajan, hacen que se calienten en gran medida, lo que obliga a buscar otros medios más eficaces de refrigeración.
Son varios los métodos o dispositivos que podemos usar para evitar este exceso de temperatura.

PARTES DEL MICROPROCESADOR
UNIDAD PRINCIPAL
La unidad de control (UC) es uno de los tres bloques funcionales principales en los que se divide una unidad central de procesamiento (CPU). Los otros dos bloques son la Unidad de proceso y el bus de entrada/salida.
Su función es buscar las instrucciones en la memoria principal, decodificarlas (interpretación) y ejecutarlas, empleando para ello la unidad de proceso.
Existen dos tipos de unidades de control, las cableadas, usadas generalmente en máquinas sencillas, y las microprogramadas, propias de máquinas más complejas. En el primer caso, los componentes principales son el circuito de lógica secuencial, el de control de estado, el de lógica combinacional y el de emisión de reconocimiento de señales de control. En el segundo caso, la microprogramación de la unidad de control se encuentra almacenada en una micromemoria, a la cual se accede de manera secuencial para posteriormente ir ejecutando cada una de las micro-instrucciones.

UNIDAD DE CALCULO
En computación, la unidad aritmético lógica, también conocida como ALU (siglas en inglés de arithmetic logic unit), es uncircuito digital que calcula operaciones aritméticas (como suma, resta, multiplicación, etc.) y operaciones lógicas (si, y, o, no), entre dos números.
Muchos tipos de circuitos electrónicos necesitan realizar algún tipo de operación aritmética, así que incluso el circuito dentro de un reloj digital tendrá una ALU minúscula que se mantiene sumando 1 al tiempo actual, y se mantiene comprobando si debe activar el pitido del temporizador, etc.

UNIDAD DE INTERCAMBIO
Esta unidad tiene por objetos adaptar el formato de datos. La velocidad de opreaciones y el tipo de señales entre procesador y los perifericos. Tambien establece el camino de entrada y salida de lso datos y realiza ciertyas funciones de control sobre los perifericos. por tanto. Esta unidad es la que comunica al procesador con el mundo exterior. Las muy diversas posibilidades de configuraciones de perifericos, los diferentes requerimientos de entrada y salida según la aplicación particular, y las notables diferencias entre las velicidades de trabajo del procesador y los perifericos. Hacen que la unidad de intercambio difiera muchos de unos sistemas a otros.

BUSES DE DATOS
Es un bus en el cual los datos son enviados por bytes al mismo tiempo, con la ayuda de varias líneas que tienen funciones fijas. La cantidad de datos enviada es bastante grande con una frecuencia moderada y es igual al ancho de los datos por la frecuencia de funcionamiento. En los computadores ha sido usado de manera intensiva, desde el bus del procesador, los buses de discos duros, tarjetas de expansión y de vídeo, hasta las impresoras.
UNIDADES DE ENRADA Y DE SALIDA
Unidades de entrada: Son los elementos que permiten incluir datos al sistema.
Ejemplos: teclado, mouse (ratón). joystic, etc.
Ejemplos: teclado, mouse (ratón). joystic, etc.
Unidades de salida: Son elementos que a diferencia de las unidades de entrada, envían al exterior del sistema información.
Ejemplo: Monitor (pantalla), impresora, parlantes, etc.
Ejemplo: Monitor (pantalla), impresora, parlantes, etc.

TECNOLOGÍAS FUTURAS
Intel, uno de los fabricantes de chips más importantes del mundo ha anunciado su nuevo procesador Core i9 fabricado en 32 nm con arquitectura Westmere. Los nuevos Core i9 harán uso de la plataforma LGA-1366 de los actuales Core i7 Nehalem y seguirán ofreciendo un controlador de memoria triple channel, 216-bit [64-bit +8-bit ECC por canal. Será procesadores fabricados en 32nm y tendrán 12 Mbytes de caché L3 pese a haber confirmado ciertos problemas térmicos con dicho proceso de fabricación, serán los más potentes del mercado doméstico.

No hay comentarios:
Publicar un comentario